Sinyal myoelectric banyak digunakan dalam berbagai penelitian seperti kegiatan olah raga, ergonomis, dan teknologi instrumentasi medis karena mioelektrik berhubungan dengan pergerakan anggota tubuh manusia. Dalam rekayasa instrumentasi dan kontrol, myoelectric sering digunakan sebagai sinyal kontrol untuk perangkat eksoskeleton prostetik dan robotik. Estimasi gerakan siku penting dalam pengembangan perangkat kontrol myoelectric seperti mekanisme robot exoskeleton. Beberapa penelitian sebelumnya menggunakan sensor mekanis seperti sensor gaya dan akselerometer serta sensor giroskop untuk mendeteksi posisi tungkai. Kendala utama pada sensor mekanik adalah adanya delay time dalam respon.
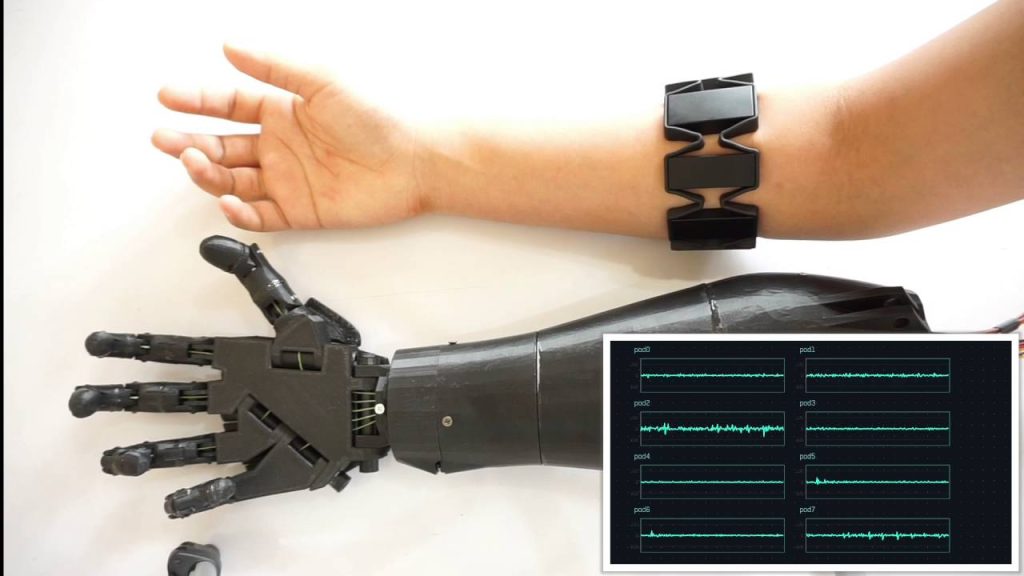
Sebagai solusi dari perasalahan tersebut, kolaborasi antara Dr. Triwiyanto, S.Si., MT. (dosen Poltekkes Kemenkes Surabaya) dan Ir. Riky Tri Yunardi, S.T., M.T. (dosen Universitas Airlangga) menggunakan sinyal EMG dalam desain robotic exoskeleton sebagai sinyal kontrol seperti ekstraksi fitur dan filter. Keuntungan menggunakan sinyal EMG adalah bahwa sinyal memiliki respon yang lebih baik dibandingkan dengan sensor mekanik.
“Dalam perkembanganya, fitur time domain (TD) digunakan untuk mengestimasi gerakan siku dan pendekatan baru Linear Kalman Filter (KF) digunakan untuk meminimalkan masalah dan keterbatasan dalam pekerjaan sebelumnya. Sehingga metode yang diusulkan mampu memperkirakan sudut sendi siku tanpa tahap pembelajaran atau pelatihan dan mengestimasi sudut sendi siku menggunakan single-channel EMG”, ujar tim dosen yang mengajar di program studi Sarjana Teknik Elektromedik dan program studi Sarjana Terapan Teknologi Rekayasa Instrumentasi dan Kontrol.
Dari hasil penelitian menunjukkan metode yang diusulkan dalam memperkirakan gerakan siku, filter Kalman secara efektif meningkatkan linearitas fitur myoelectric. Setelah proses KF, parameter linier estimasi sudut meningkat dengan nilai correlation coefficient sebesar 0.974 ± 0.012.
Beberapa gangguan seperti pergeseran lokasi elektroda, keringat, dan kelelahan otot perlu diperhatikan untuk meningkatkan kinerja estimasi. Penelitian ini diharapkan mampu diterapkan dalam teknologi instrumentasi dan kontrol khususnya teknologi kesehatan yang dapat diproduksi dalam skala besar dan dapat dipasarkan, karena robotic exoskeleton ini sangat bermanfaat dalam bidang kesehatan untuk mendukung SDGs pada Good Health and Well-being.
Penulis: Riky Tri Yunardi