
Mekanisme kendali motor merupakan elemen kunci pada berbagai aplikasi, mulai dari robotika dan otomasi industri hingga peralatan rumah tangga. Kendali motor yang efisien dan presisi sangat penting untuk mengoptimalkan kinerja dan konsumsi energi, sehingga mendorong pengembangan teknik kendali dan strategi optimasi yang semakin maju. Dalam konteks ini, pemanfaatan algoritma kendali lanjutan, termasuk kendali prediktif, terus mengalami peningkatan.
Selama lebih dari satu dekade, pengembangan model predictive control (MPC) untuk aplikasi penggerak listrik mengalami kemajuan yang pesat. Keunggulan utama MPC pada sistem penggerak listrik adalah kemampuannya memanfaatkan model matematis sistem untuk memprediksi dinamika masa depan, sehingga memungkinkan perancangan aksi kendali yang lebih akurat. Selain itu, MPC memiliki kejelasan konsep, implementasi yang relatif sederhana, mampu menangani nonlinieritas, serta cakap mengelola banyak variabel secara bersamaan.
Salah satu penerapan penting MPC pada penggerak listrik adalah model predictive current control (MPCC) yang ditujukan untuk meningkatkan respons dinamik arus motor. Keunggulan MPCC antara lain adalah tidak memerlukan modulasi PWM konvensional karena vektor tegangan saklar dapat dipilih langsung pada setiap periode pencuplikan. Implementasi MPCC satu vektor (single vector MPCC/SVMPCC) dilakukan dengan memilih vektor tegangan optimal berdasarkan galat arus minimum dari delapan keadaan pensaklaran inverter dua tingkat. Vektor tegangan yang terpilih kemudian diterapkan selama satu periode pencuplikan penuh. Namun, ketika vektor tegangan referensi berada di antara dua vektor aktif yang berdekatan, terjadi perbedaan antara tegangan referensi sebenarnya dan vektor tegangan terpilih, yang mengakibatkan penurunan kualitas respons arus.
Untuk mengurangi riak arus dan torsi serta menurunkan total harmonic distortion (THD), beberapa strategi telah dikembangkan dengan cara menambah jumlah vektor tegangan yang mungkin digunakan dalam satu periode pencuplikan. Dual vector MPCC (DVMPCC) diusulkan untuk meningkatkan respons arus motor dengan menerapkan dua vektor tegangan dalam satu interval pencuplikan melalui eksplorasi berbagai kombinasi keadaan pensaklaran. Pendekatan ini meningkatkan jumlah modus pensaklaran yang layak dan mengurangi galat prediksi. Lebih lanjut, metode multi-vektor lainnya memanfaatkan lebih banyak kandidat vektor dalam satu periode pencuplikan untuk meningkatkan ketelitian prediksi arus dan memperluas rentang modulasi.
Makalah ini mengusulkan metode baru skema kendali arus prediktif, yaitu model predictive current controller tiga vektor termudulasi (triple vector MPCC/TVMPCC) dengan prapemilihan tiga kandidat vektor tegangan berdasarkan tegangan referensi yang diprediksi. Tiga kandidat vektor tegangan dipilih dan dimodulasi secara tepat sehingga memperkaya kemungkinan vektor yang diterapkan ke inverter dan meningkatkan akurasi prediksi. Di sisi lain, skema modulasi siklus kerja yang efisien diajukan dengan memanfaatkan rasio antara tegangan fasa-ke-fasa referensi dan tegangan DC masukan untuk menentukan waktu penerapan masing-masing vektor tegangan. Selain itu, pengendali kecepatan model prediktif dengan kendala berbasis pemrograman kuadratik diimplementasikan untuk meningkatkan kinerja dinamik pengaturan kecepatan. Kombinasi ini menghasilkan metode yang mampu mengurangi kompleksitas komputasi sekaligus meningkatkan performa sistem penggerak, khususnya dalam menekan riak arus dan torsi pada berbagai kondisi beban dan kecepatan. Blok diagram dan fisik foto konfigurasi sistem ditunjukkan pada Gambar 1 dan Gambar 2(a)(b).
Gambar 1. Konfigurasi sistem
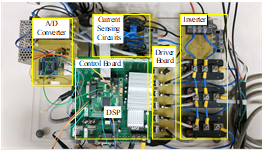
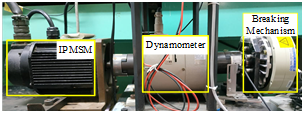
Gambar 2. Fisik foto konfigurasi sistem (a) inverter (b) dinamometer
Hasil dan Pembahasan
Makalah ini menggunakan PMSM 500 W, 4 kutub, dengan kecepatan nominal 2000 rpm. Spesifikasi motor dan kondisi eksperimen dirumuskan sebagai berikut: r_s = 1,9 Ω, L_d = 0,0015 H, L_q = 0,0031 H, λ_m = 0,227 V·s/rad, J_m = 0,001 kg·m², dan B_m = 0,0005 N·m·s/rad. Selain itu, tegangan bus DC diatur sebesar 200 V, sedangkan frekuensi pensaklaran inverter ditetapkan sebesar 10 kHz. Interval pencuplikan untuk loop arus ditetapkan sebesar 100 µs, dan untuk loop kecepatan sebesar 1 ms.
Sejumlah pengujian dilakukan untuk memvalidasi kinerja TVMPCC. TVMPCC yang diusulkan dibandingkan dengan dua metode pengendali arus prediktif lainnya, yaitu SVMPCC dan DVMPCC. Semua variabel eksperimen diatur sama untuk setiap pengendali. Gambar 5 menunjukkan hasil validasi eksperimental pada kondisi keadaan mantap. PMSM dioperasikan pada kecepatan nominal 2000 rpm dengan beban eksternal 1 N·m. Gambar 3(a) menampilkan kinerja keadaan mantap TVMPCC yang diusulkan, termasuk arus fasa a–b–c, kecepatan, dan torsi elektromagnetik. Gambar 3(b) menunjukkan kinerja keadaan mantap DVMPCC, sedangkan Gambar 3(c) menunjukkan kinerja keadaan mantap SVMPCC. Seperti dapat diamati, TVMPCC yang diusulkan memberikan respons arus yang lebih baik dengan riak arus yang lebih kecil pada arus fasa dibandingkan kedua pengendali lainnya. Selain itu, respons kecepatan dan torsi pada TVMPCC juga memiliki riak yang minimal dan tampak sangat halus. Nilai total harmonic distortion (THD) arus untuk TVMPCC yang diusulkan adalah 5,26%, sedangkan untuk kedua pengendali lainnya masing-masing sebesar 12,75% dan 17,63%. Berdasarkan data ini, TVMPCC yang diusulkan mampu menekan THD lebih baik dibandingkan metode konvensional lainnya. Di sisi lain, riak torsi pada TVMPCC yang diusulkan adalah 0,105 N·m, sedangkan pada DVMPCC dan SVMPCC masing-masing sebesar 0,598 N·m dan 0,676 N·m. Sekali lagi, metode yang diusulkan menunjukkan kinerja yang baik dalam meminimalkan riak torsi. TVMPCC yang diusulkan memiliki kinerja yang lebih baik dibandingkan kedua pengendali lainnya karena menggabungkan dua vektor aktif yang berdekatan berdasarkan posisi tegangan referensi terprediksi dan menerapkan rasio siklus kerja secara daring (online). Dengan demikian, tegangan rata-rata yang diterapkan dapat mengikuti tegangan referensi secara lebih dekat dan menghasilkan minimisasi riak. Sebaliknya, SVMPCC hanya menggunakan satu vektor aktif dalam satu periode pencuplikan dan DVMPCC menerapkan dua vektor tegangan aktif yang berdekatan dengan rasio siklus kerja tetap. Tegangan referensi sebenarnya yang terletak di antara vektor-vektor berdekatan tersebut menyebabkan galat prediksi arus yang lebih besar dan menghasilkan riak yang lebih tinggi.
Gambar 4(a), (b), dan (c) memperlihatkan respons sistem penggerak ketika perintah kecepatan diubah dari 0 rpm menjadi 500 rpm dan kemudian menjadi 2000 rpm. Arus fasa a–b–c, arus pada sumbu d–q, dan kecepatan diukur. Seperti dapat diamati dari gambar-gambar tersebut, respons arus pada TVMPCC yang diusulkan memiliki riak yang lebih halus selama kondisi transien maupun keadaan mantap dibandingkan kedua pengendali lainnya. Terlihat bahwa PMSM berakselerasi dengan cepat ketika perintah kecepatan diubah tanpa fluktuasi arus yang besar ataupun lonjakan kecepatan (overshoot) yang signifikan.
Pengontrol Prediktif Model Vektor Tiga Termodulasi untuk Penggerak PMSM Berdasarkan Pemilihan Posisi Referensi Tegangan
Hasil eksperimen secara jelas menunjukkan bahwa metode TVMPCC yang diperkenalkan dalam penelitian ini memberikan kinerja yang unggul, baik pada respons keadaan mantap maupun respons transien.
Penulis: Muhammad Syahril Mubarok, S.ST., M.Sc., Ph.D.